6 Wire Stepper Motor Sequence
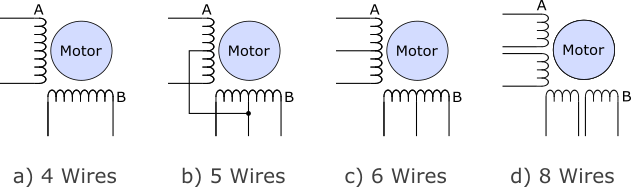
Difference Between 4 Wire 6 Wire And 8 Wire Stepper Motors National Instruments
Connect 6 Wire Stepper Motor To An Ni Stepper Motor Drive National Instruments
How To Wire Stepper Motors

How To Reuse 4 And 6 Wires Stepper Motors For Your Projects Renzo Mischianti

How To Wire A Stepper Motor Simply Smarter Circuitry Blog

Difference Between 4 Wire 6 Wire And 8 Wire Stepper Motors National Instruments Stepper Motor Steppers Motor
The bipolar series connections are shown here.
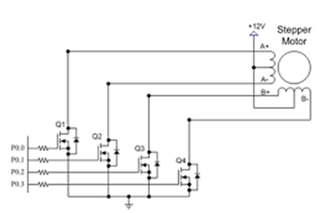
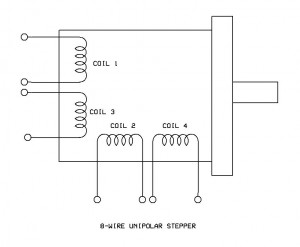
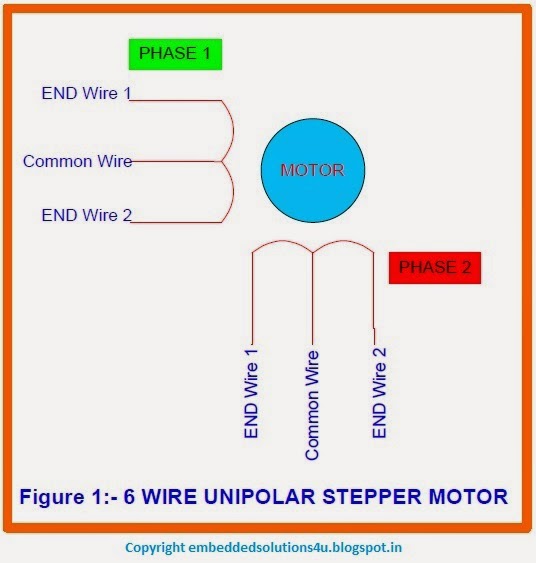
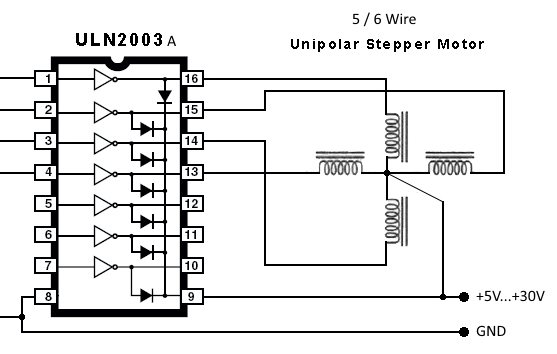
6 wire stepper motor sequence. Speaking specifically of holding torque the datasheet shows that if you turn the motor on a unipolar driver it loses 30 of the torque. This shows that the stepper motor in general starts at a low rpm and the torque decreases as the speed increases. The buildbotics cnc controller does not support unipolar motors. Two wire leads connect to either end of one phase with a third wire connected to the center point between the coils as shown in figure 1.
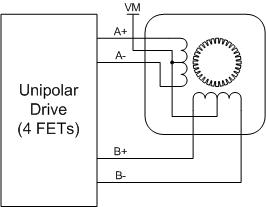
6 wire motor this motor only joins the common wires of 2 paired phases. A 6 wire stepper motor is similar to a 4 wire configuration with the added feature of a common tap placed between either end of each phase as shown in figure 2. This wiring configuration is best suited for applications requiring high torque at relatively low speeds. If you can see the led pattern is correct then just measure the resistance of the windings.
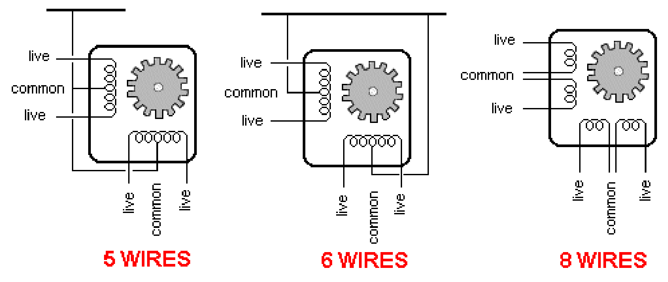
These two wires can be joined to create a 5 wire unipolar motor. If your stepper motor has 4 wires it is a bipolar stepper motor. A typical 6 wire stepper motor connection diagram is shown in figure 1. 6 wire motors have two center tapped coils and expose the ends of the coils and the center tapped conductor of the coil.
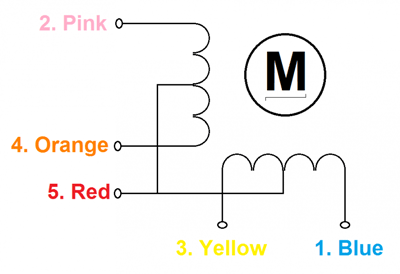
Or you just can ignore them and treat it like a bipolar motor. Since coils a and b on the diagram above are not connected the resistance between leads a1 and b1 or between a1 and b2 will be infinite. In the full step sequence two coils are energized at the same time and motor shaft rotates. Unipolar configuration 6 wire motors have three wires per phase.
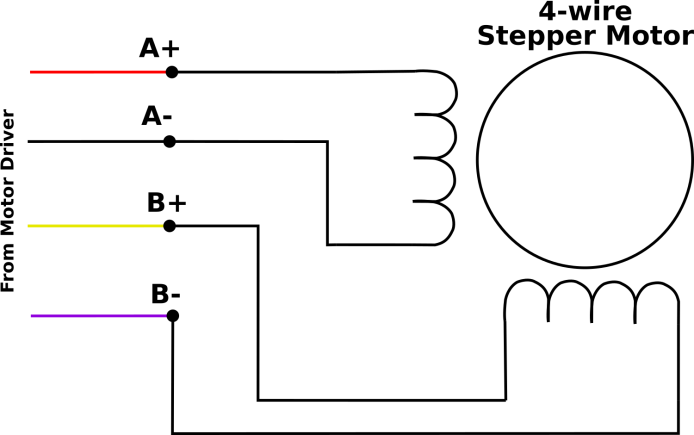
Bipolar stepper motors have two windings which are not connected to each other wired internally like this. The order in which coils has to be energized is given in the table bel ow. As a unipolar motor. Namely full step sequence half step sequence full step sequence.
Stepper motors with these center taps are often referred to as unipolar motors. 6 wire motors can be configured as either unipolar or bipolar series motors. 0110 6 0011 3 etc etc. It can be driven in several ways.
Step sequence of stepper motor stepper motors can be driven in two different patterns or sqeunces. As already said we will talk mostly on unipolar stepper motors which is most common type of stepper motor available in the market a simple example of 6 lead step motor is given below and in 5 lead step motor wire 5 and 6 are joined together to make 1 wire as common. This third wire is commonly referred to. This is a datasheet of a nema 17 6 wire which can be connected as bipolar or as unipolar.

How To Use A Stepper Motor Stepper Motor Electrical Engineering Projects Motor

28byj 48 Stepper Motor Arduino Stepper Motor Electronics Projects

Stepper Motor Speed Control With An Ne555 Timer Hackster Io Motor Speed Stepper Motor Inverter Welding Machine
4 5 6 And 8 Wire Stepper Motors 9 Steps Instructables

Nema 23 Stepper Motor Dimensions Stepper Motor Steppers Motor

Schematic Diagram Stepper Motor Wiring Schematic And Wiring Diagram In 2020 Electrical Circuit Diagram Wire Washing Machine Motor
How To Wire Your Stepper Ebldc Com

Https Encrypted Tbn0 Gstatic Com Images Q Tbn 3aand9gcried4iwmbkql5mhujqepcccvssl6op9clfrw Usqp Cau

Motor Shield V2 0 Wiki Motor Shield Arduino
Lab 2b Dynamic Stepper Motor Control Digilent Documentation

Micro Controller Based Automatic Stepper Motor Terminals Sequence Identifier
Stepper Motor Information Teensystep

Stepper Motor Speed Control With An Ne555 Timer Hackster Io Motor Speed Stepper Motor Inverter Welding Machine

Automatic Electric Payphone Wiring Google Search Electrical Problems Repair Guide Electricity

Stepper Motor Driver
Stepper Motor Wiring Tutorial 42 Bots

Stepper Motor Wiring Stepper Motor Arduino Projects Steppers

Wiring Driving The L298n H Bridge With 2 To 4 Dc Motors Driving Bridge Wire
Https Encrypted Tbn0 Gstatic Com Images Q Tbn 3aand9gcsjaaykdcc2nlagyg4353lozkxugfm1bvxgdoccvbs3uummlypy Usqp Cau
Arduino Stepper Motor Control Tutorial With Code And Circuit Diagram
Unipolar Stepper Won T Work There 4 Or 5 Wires

Nema 23 Stepper Motor Pinout Stepper Motor Motor Diy Electronics

Controlling A Stepper Motor With An Arduino Part 2 Azega
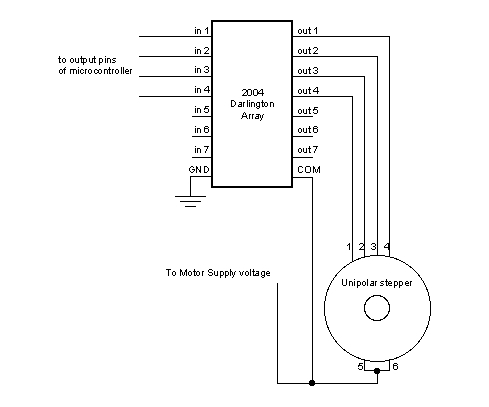
Embedded System Solution How To Control Stepper Motor Using Uln2003 And 8051 At89c51
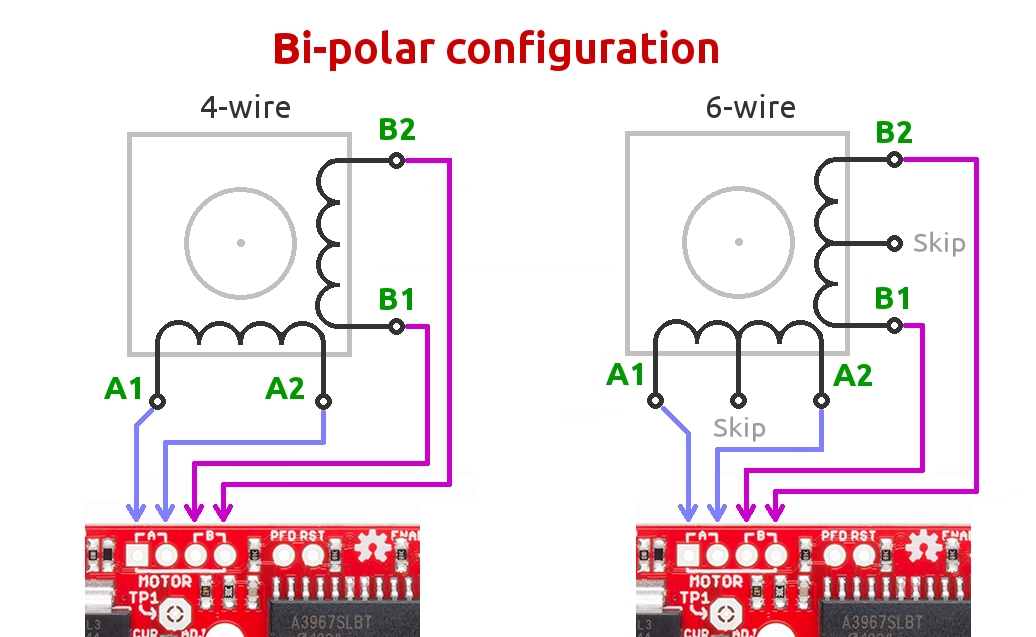
Diagram 4 Wire Stepper Motor Diagram Full Version Hd Quality Motor Diagram Diagraminc Lineakebap It
Stepper Motor

Brushless Dc Motors Control How It Works Part 1 Of 2 Motor Electronics Basics Motor Works
.jpg)
A Guide To Stepper Motors

Mcp23s17 Class For Arduino Arduino Class Bar Chart
Https Www Astrosyn Com Wp Content Uploads 2015 10 Guide To Stepper Motor Drive Selection Pdf

Usb Wire Color Code And The Four Wires Inside Usb Wiring Color Coding Electronic Schematics Electronics Projects Diy
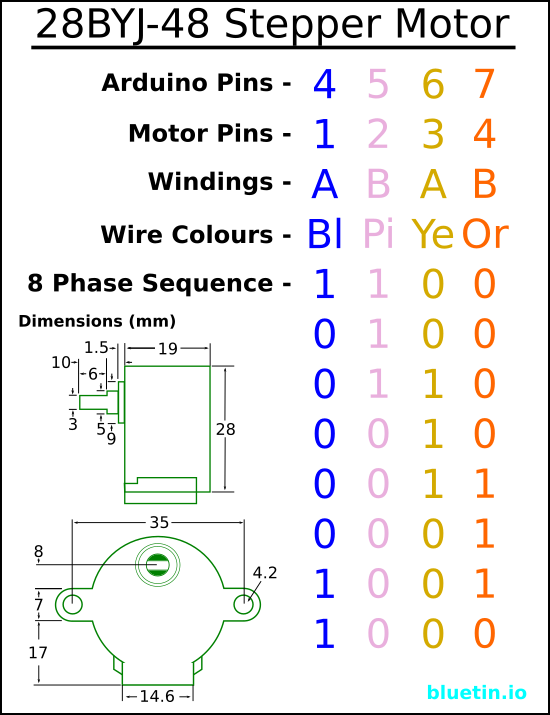
28byj 48 Stepper Motor With Driver Code For Arduino Bluetin Io
Arduino Stepper Uln2003a Coeleveld Com
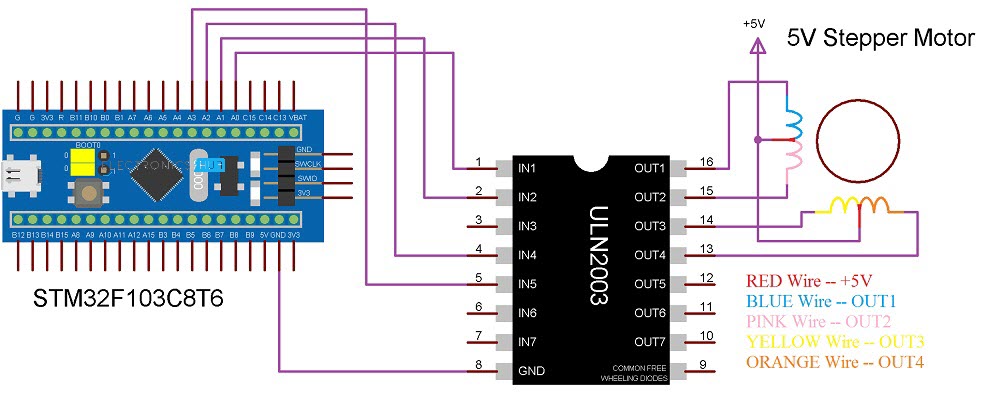
Interfacing Stepper Motor With Stm32f103c8t6 Stm32 Stepper Motor
Https Encrypted Tbn0 Gstatic Com Images Q Tbn 3aand9gcq8ealeontwhcphx Fjpnd8hk7rol Vviusg Usqp Cau
Steppernews Driving A Unipolar Stepper Motor With The Nxp Pca9537
Scs Direct Drive Permanent Magnet Dc Stepper Motors

Meyer Toggles Underhood Wiring Diagram Jpg 464 454 Wire Toggle Switch Diagram

Controlling A Stepper Motor With An Arduino 8 Steps With Pictures Instructables

Control Stepper Motor Using Digital Outputs Matlab Simulink Mathworks Australia
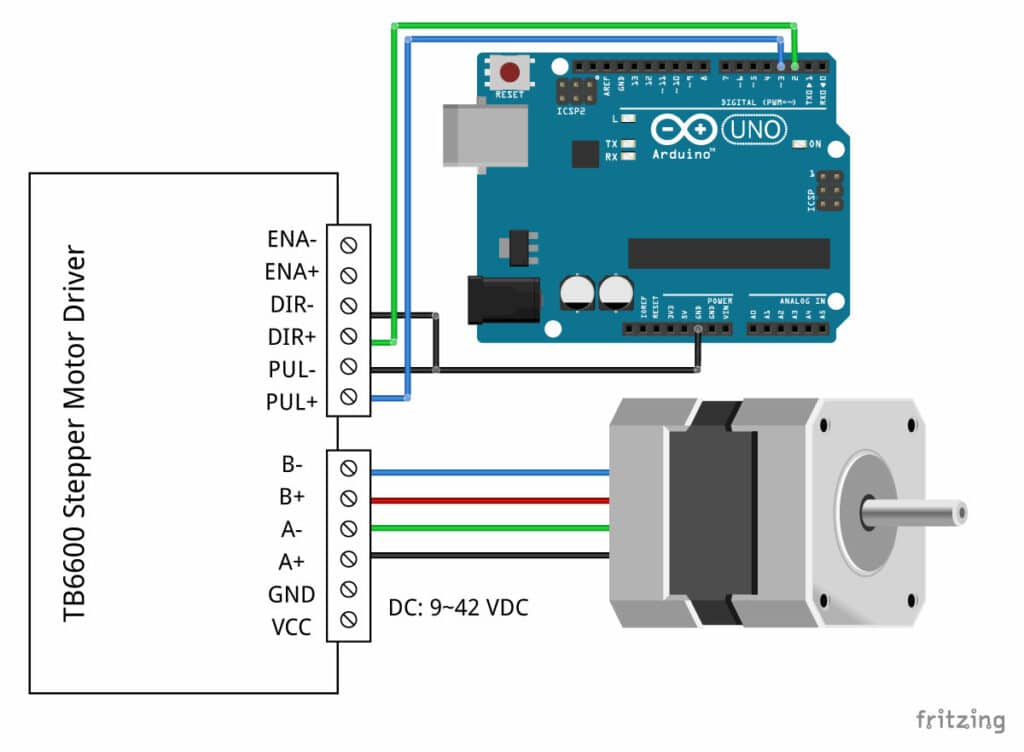
Tb6600 Stepper Motor Driver With Arduino Tutorial 3 Examples

